By Gene Markel
Technical Editor
 Driving skills and Electronic Stability Control
Driving skills and Electronic Stability Control
One of the first things a novice driver asks is: “Do I turn into the skid or away from it?” With Electronic Stability Control, this decision is made for us. When a vehicle begins to skid during a cornering maneuver, the skilled driver steers into the direction of the rear wheels and modulates the throttle to control the skid. Electronic Stability Control program (ESC) operates with no action on the part of the driver. When activated the stability control program reduces engine rpm and applies braking to the appropriate wheels to eliminate the skid.
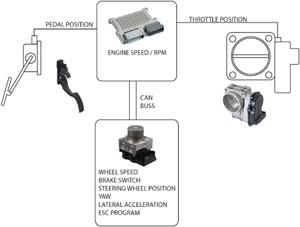
The Electronic Stability Control (ESC) program uses the Anti-Lock Brake System (ABS) and Electronic Throttle Control (ETC) to maintain vehicle stability in a cornering maneuver. The ESC program requires the communication between the Engine Control Module (ECM) and ABS controller. This communication takes place on the Controlled Area Network (CAN) buss of the vehicle. The program uses input from the following sensors: steering wheel position, throttle pedal position, throttle position, engine speed, brake switch, wheel speed, yaw and lateral acceleration.
Terminology: It is all about Physics
The thrust angle is measured on the Z axis to align the axles to the chassis centerline, both parallel and perpendicular.
Acceleration/deceleration is linear force generated on the Z-axis that can affect vehicle stability, if improperly aligned to the thrust angle. Cornering is defined by an engineer as a lateral acceleration that is a linear force generated on the X-axis of the vehicle (Figure 1).
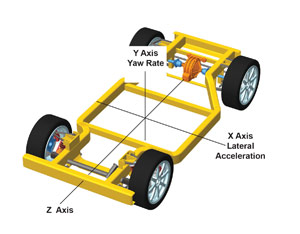 |
| Figure 1 |
A skid is defined as a yaw event. Yaw is a rotational force generated when it is cornering. Center of gravity is the point at which a vehicle rotates in a corner at high speed. The yaw sensor, a Coriolis-type sensor, is located at the center of gravity. The Coriolis effect depends on the velocity of the moving object (a vehicle in a cornering maneuver), and centrifugal force, which does not depend on the velocity of the moving object (the rotation of the chassis in a skid). This is the point at which the vehicle will rotate on the turning radius at speed.
Ackerman angles apply for low speed cornering. Steering angles are a compromise between Ackerman and center of gravity angles and use the elasticity of the tires to compensate for the differences in the angles. The yaw sensor is placed at the center of gravity to accurately measure yaw and lateral acceleration (Figure 2). So how does it apply to repairing a vehicle problem?
Applying the Terminology
The two key components to the operation of the ESC program are the steering wheel position sensor and the yaw sensor. Any ESC event will be initiated by a steering sensor input followed by a yaw sensor input to the ABS controller that will activate the ESC program. The yaw sensor that is currently used will measure yaw and lateral acceleration.
There are three types of steering position sensors — resistive, optical and anisotropic magneto resistive (AMR). These sensors can produce an analog signal that can be measured with a digital volt meter and a digital signal. It may be necessary to use a scan tool to accurately measure the performance of a steering position sensor.
The ABS, ETC and the ESC programs put the sensors’ input to an algorithm, a specific set of values, for a given vehicle, to modulate the throttle and apply braking. The algorithm uses values that assume; the ABS is properly maintained; foundation brakes are in good condition and have the correct friction material; the tires are the correct size and have proper tread depth.
If the foundation brake and tire performance don’t match algorithm values, ESC may have no effect on the control of the skid.
Vehicle Maintenance and Repair
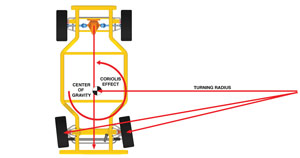 |
| Figure 2 |
Correct service information for the vehicle is key to making sure that you fix it right the first time. It is also increasingly important to have a scan tool or pass through device that will allow you to retrieve input /output data and perform test and calibration operations.
When the mechanical alignment is complete and the steering angle is zero, the next critical step is to calibrate the steering position sensor to zero.
Not calibrating the steering angle to zero can cause a false activation of the program. If there are any ABS and/or ETC/ECM intermittent trouble codes that may not have set an indicator yet, they can cause the ESC program to be deactivated because the steering and yaw information is shared on the CAN buss to the ECM for throttle control.
To resolve the trouble codes, it will be necessary to use a scan tool to retrieve codes and data. Most ABS systems have scan tool functions to prime and bleed the ABS. This operation can be required as part of a normal pad replacement
The following chassis Diagnostic Trouble Codes are associated with the yaw sensor and steering position malfunctions.
C1279 — Yaw Rate Sensor Circuit Failure.
C1280 — Yaw Rate Sensor Signal Fault.
C1282 — Yaw Rate Sensor Bias Circuit Malfunction.
C1283 — Excessive Time to Center Steering.
C1284 — Lateral Accelerometer Sensor Bias Malfunction.
C1285 — Lateral Accelerometer Sensor Circuit Malfunction.
C1286 — Steering Sensor Bias Malfunction.
C1287 — Steering Sensor Rate Malfunction.
C1288 — Steering Sensor Circuit malfunction.
Collision repair of a unibody chassis should be performed on a table. The use of the table ensures that the chassis is straight and true and the suspension attaching points are properly located to ensure that the cradle and axles are properly aligned. The vehicle must be properly attached to the table at the pinch rails and a series of tram gauges used to check chassis alignment and suspension locations. What may have been perceived as a minor collision could have resulted in misalignment that would be recognized in a visual inspection.
DSC, ESP, ESC, PSM and VSC
Vehicle manufacturers have assigned various names for the program. The following is a list of vehicles sold in the U.S. and Canada:
Audi/VW: Electronic Stabilization Program (ESP).
BMW/MINI Cooper: Dynamic Stability Control (DSC).
Chrysler/Dodge: Electronic Stability Program (ESP).
Ford: Advance Trac.
GM: StabiliTrak.
Honda/Acura: Vehicle Stability Assist (VSA).
Hyundai/Kia: Electronic Stability Program (ESP).
Nissan/Infiniti: Vehicle Dynamic Control (VDC).
Jaguar: Dynamic Stability Control (DSC).
Jeep: Electronic Stability Program (ESP).
Land Rover: Dynamic Stability Control (DSC).
Toyota/Lexus: Vehicle Stability Control (VSC).
Mazda: Dynamic Stability Control (DSC).
Mercedes: Electronic Stability Program (ESP).
Mitsubishi: Active Skid and Traction Control.
Porsche: Porsche Stability Management (PSM).
Subaru: Vehicle Dynamics Control Systems (VDCS).
Volvo: Dynamic Stability and Traction Control (DSTC).